How to Process 3D Point Cloud Data?
3D point cloud is Three Dimensional (3D) data represent physical object in 3D coordinate system. Each point represents a single measurement, capturing the precise location of a specific point in space with an x, y, and z coordinate. It also stores some information such as geometric coordinates, RGB colour, intensity, reflectance value, and normal vectors.
Although point cloud has some data embedded in each point, those data will not give us any information if we do not extract semantic information of it. There are several steps needed to extract semantic information from 3D point cloud. The process can include manual processing or automatic processing using specific programming method. Below are general steps to process 3D point cloud data.
1. Pre-Processing: Preparing the Data
Before diving into analysis, we ensure the point cloud is ready for interpretation:
- Filtering: Removing noise and outliers that might distort results, like stray points from reflections or sensor errors.
- Downsampling: Reducing the number of points to make processing more efficient, especially for large datasets, while preserving essential details.
- Registration: Aligning multiple point clouds from different scans into a unified coordinate system, creating a seamless representation of the entire scene.
2. Segmentation: Grouping the Dots into Meaningful Clusters
Here, we start identifying distinct objects or regions within the point cloud:
- Region Growing: Connecting neighboring points based on similarity in properties like color, intensity, or geometric features.
- Model Fitting: Applying geometric models (planes, spheres, cylinders) to segment structures like walls, pipes, or tree trunks.
- Machine Learning: Employing algorithms to learn patterns and classify points into categories like trees, buildings, or vehicles.
3. Feature Extraction: Drawing Out the Fingerprints
We now extract key characteristics to describe each segmented object or region:
- Geometric Features: Calculating surface normals, curvature, or bounding boxes to reveal shape characteristics.
- Spatial Features: Analyzing spatial relationships between objects, like distance, proximity, or alignment.
4. Classification and Analysis: Deriving Meaning from the Features
Finally, we assign semantic meaning to the extracted features:
- Object Classification: Labeling objects based on their features (e.g., “car,” “tree,” “building”).
- Change Detection: Identifying differences between point clouds of the same area over time, useful for monitoring construction progress or environmental changes.
- Measurement and Modeling: Extracting dimensional information for tasks like volume estimation, model creation, or structural analysis
5. Visualization and Exploration: Bringing the Data to Life
We visualize the processed point cloud to interact with it intuitively:
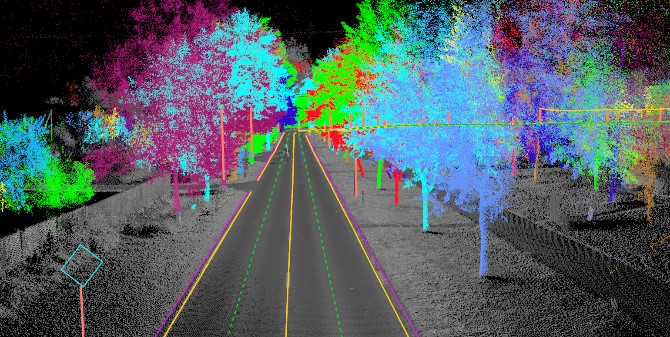
- Color Mapping: Enhancing visual interpretation by assigning colors based on object classes, intensity values, or other attributes.
- 3D Models: Generating detailed 3D models for virtual tours, simulations, or design integration.
As point cloud technology evolves, processing techniques are becoming more sophisticated, incorporating deep learning, multi-sensor fusion, and cloud-based processing. These advancements pave the way for even more intricate understanding of the world around us, enabling exciting applications in autonomous vehicles, smart cities, cultural heritage preservation, and beyond!
Software for Process 3D Point Cloud
General-Purpose Point Cloud Processing:
- CloudCompare: A free, open-source software with extensive tools for filtering, registration, segmentation, analysis, and visualization. This is a very popular software used by point cloud user to read and modify their data.
- MeshLab: Another free, open-source software focused on mesh processing, with point cloud editing and cleaning capabilities.
- Geomagic Studio: A comprehensive commercial software with advanced tools for point cloud editing, mesh creation, analysis, and CAD integration.
- PointCab: Commercial software with a focus on architectural and construction applications, offering point cloud cleaning, modeling, and BIM integration.
Industry-Specific Point Cloud Software:
- Autodesk ReCap: Designed for architecture, engineering, and construction, specializing in point cloud cleaning, registration, and integration with Autodesk design suites.
- Trimble RealWorks: Suite of software for surveying, mapping, and construction, offering point cloud processing, analysis, and integration with Trimble hardware.
- Leica Cyclone: Comprehensive software for surveying and mapping, including point cloud processing, 3D modeling, and geospatial analysis.
- Terrasolid: Suite of software for photogrammetry and LiDAR processing, with advanced tools for point cloud classification, feature extraction, and terrain modeling.
- Pix4D: Popular photogrammetry software that also handles LiDAR point cloud processing, offering 3D modeling, mapping, and orthophoto generation.
Cloud-Based Point Cloud Processing:
- Vercator: Automatic cloud-based processing for large point cloud datasets, providing cleaning, compression, and visualization capabilities.
- PointFuse: Cloud-based software for converting point clouds into lightweight 3D meshes for easier sharing and visualization.
Automatic 3D Point Cloud Processing
General-Purpose Machine Learning Library with Point Cloud Capabilities:
- TensorFlow: A versatile open-source framework from Google with extensive support for deep learning, 3D data processing, and visualization tools like TensorFlow Graphics and PointNet++.
- PyTorch: Another popular open-source framework known for its flexibility and ease of use, with libraries like Kaolin and PyTorch3D specifically designed for 3D deep learning tasks.
- Scikit-learn: A comprehensive library for traditional machine learning algorithms in Python, including modules for point cloud classification and clustering.
Specialized Point Cloud Processing Libraries with ML Integration:
- PCL (Point Cloud Library): A comprehensive open-source library with a vast array of point cloud processing algorithms, including machine learning modules for tasks like segmentation and classification.
- Open3D: An open-source library offering a versatile set of tools for 3D data processing, including machine learning capabilities for point cloud analysis and feature extraction. We can use open3D in python to automate the process.
- PDAL (Point Data Abstraction Library): An open-source library focused on efficient point cloud filtering, cleaning, and transformation, with integration options for machine learning pipelines
Cloud-Based Platforms for ML-Powered Point Cloud Processing:
- Azure Kinect DK: Microsoft’s platform offers real-time 3D sensing and processing capabilities, including machine learning-based object detection and tracking for point clouds.
- Pointly: A cloud-based platform specifically designed for processing large point cloud datasets using machine learning algorithms, with features for classification, segmentation, and feature extraction.
- Reconstruct.ai: A cloud-based platform for 3D reconstruction and point cloud processing, harnessing machine learning for tasks like object segmentation and mesh generation.
Factors to Consider When Choosing Tools to Process 3D Point Cloud
- Ease of Use: Some frameworks are more beginner-friendly, while others require deeper programming expertise.
- Performance: Consider processing speed, memory usage, and scalability for large datasets.
- Community and Support: A large community and extensive documentation can be invaluable for troubleshooting and learning.
- Integration with Other Tools: Ensure compatibility with your existing 3D software, visualization tools, or cloud infrastructure.
- Specific Needs: Choose tools that align with your specific tasks, such as object classification, segmentation, or model generation.
It’s often recommended to experiment with different options to find the best fit for your project’s requirements and your team’s skills.
Category List
- 3D Point Cloud
- Artificial Intelligence
- Asset Management
- Digital Twin
- Featured
- Hardware
- Knowledge Graph
- LiDAR
- News
- Site Monitoring
- Vegetation Monitoring
- Virtual Reality
Recent Post
- Scan-to-BIM Workflow Explained: From LiDAR Point Cloud to BIM Model
- As-Built Drawing Survey Sydney: LiDAR Verification for Construction Projects
- Digital Twin for Construction Projects – How LiDAR Powers Real-Time Site Models
- Road Asset Management Sydney
- Pavement Condition Survey: AI-Powered Road Assessment for Local Councils